CCHS Melbourne
Publisher of the public LoliBot repository used for software-guide, example-code, and workshop source evidence.
Sourcelinux.conf.au 2018 Open Hardware Miniconf · Australia · 2018
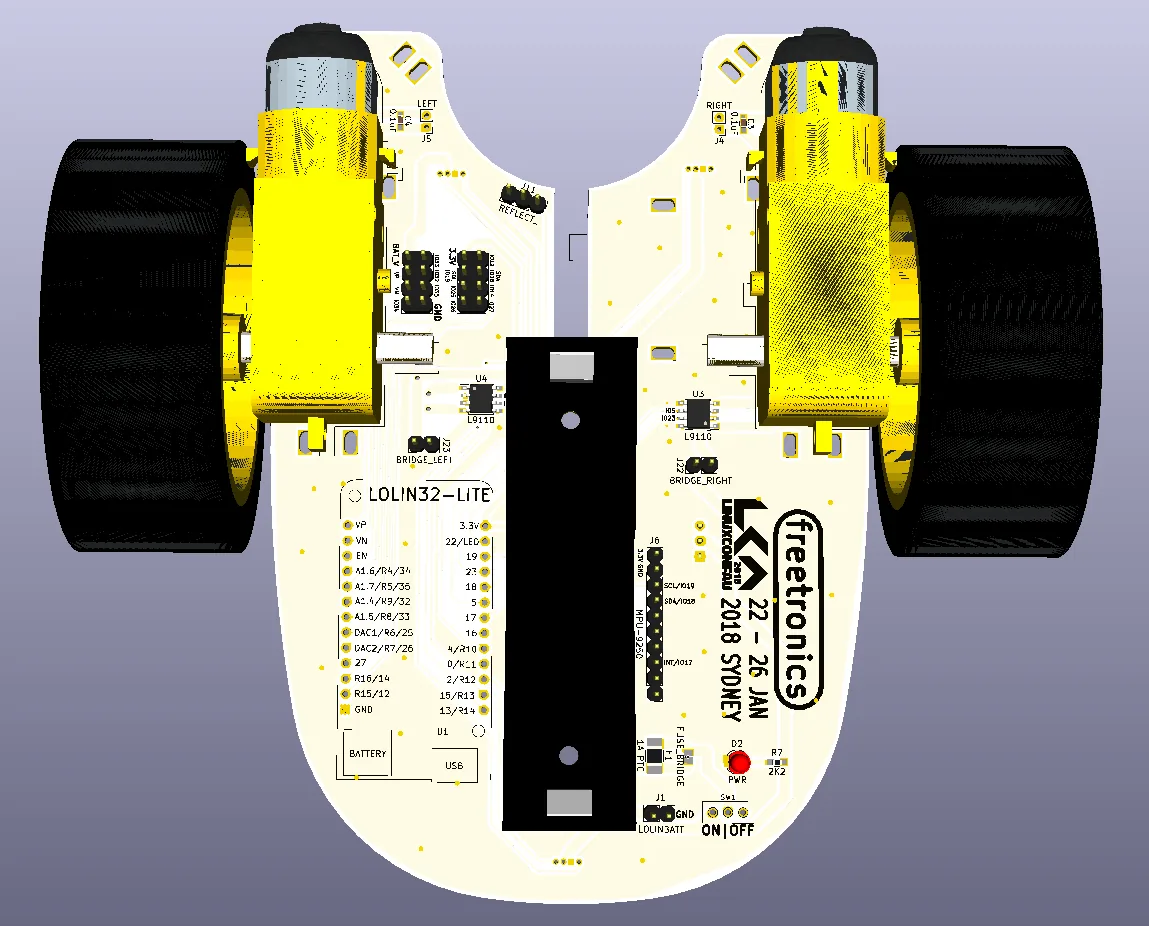
ESP32 soccer-robot kit for the linux.conf.au Open Hardware Miniconf
linux.conf.au 2018's Open Hardware Miniconf used LoliBot, an ESP32 two-wheel robot kit with MicroPython workshop material, public example software, USB serial setup, WiFi/MQTT configuration, sensors, motors, neopixels, and a front kicker servo.
People
Publisher of the public LoliBot repository used for software-guide, example-code, and workshop source evidence.
SourceThe MicroPython tutorial page says the project is maintained by nickzoic and documents the OHMC LoliBot MicroPython exercises.
SourcePublished first-hand LCA2018 Open Hardware Miniconf notes corroborating the ESP32 MicroPython robot activity and adjacent hardware sessions.
SourcePublisher of the retired LoliBot robot-kit page documenting the ESP32 robot hardware feature set and resource links.
SourceThe software guide directs LCA2018 OHMC participants to organizers and helpers for workshop assistance, but this pass has not mapped every helper name to the LoliBot record.
SourceLoliBot broadens the Oceania LCA hardware lineage from badge-shaped boards into event-built programmable robots: it kept the Open Hardware Miniconf pattern of public hardware evidence, hands-on assembly, ESP32 experimentation, and attendee follow-on hacking.
LoliBot is a retired two-wheel robot kit with a Lolin32-Lite ESP32 brain, 2-wheel skid steering, onboard 18650 Li-Ion holder, USB battery charging, WiFi, Bluetooth, 9-DOF IMU, and a front-mounted kicker servo for robot soccer, per Freetronics. The MicroPython tutorial adds three APA106-style neopixels, a reflection sensor, H-bridge motor control pins, I2C accelerometer pins, and exposed headers.
LCA2018 Open Hardware MiniConference workshop setup covered MicroPython on ESP32, CH340 USB serial access, esptool.py flashing, ampy/rshell file transfer, bundled January 2018 firmware, LoliBot application installation scripts, WiFi configuration, MQTT configuration, RGB LED boot status, and serial REPL interaction, per the CCHS Melbourne software guide.
The source trail presents LoliBot as a soccer-playing robot kit built at the Open Hardware Miniconf, with Nick Moore's MicroPython tutorial telling attendees to bring theirs along and Marc Merlin's field report describing an ESP32 MicroPython programmed robot alongside FPGA, Tomu, and protocol-analysis sessions.
Lifecycle
The CCHS software guide covers CH340 serial access, esptool.py flashing, MicroPython firmware installation, ampy/rshell workflows, application install scripts, and REPL interaction.
SourceFreetronics documents LoliBot as a two-wheel robot kit with a Lolin32-Lite ESP32 brain, WiFi/Bluetooth, onboard 18650 power, USB charging, and skid-steering drive.
SourceThe software guide documents WiFi credential setup, RGB LED boot status, MQTT host configuration, and serial-console checks for networked LoliBot behavior.
SourceThe tutorial documents neopixels, motor H-bridges, reflection sensor input, exposed headers, and a kicker servo, with exercises for lights, wheels, servo motion, sensor detection, and touch inputs.
SourceOperational history
The public badge page, image archive, and API now point at an exact upstream LoliBot render with source URL, license, attribution, and processing notes preserved instead of generated or placeholder imagery.
The entry is modeled as a conference hardware kit in the linux.conf.au badgelife lineage rather than an attendee identity badge.
The dossier records verified hardware/software behavior and image provenance while avoiding unsupported production-run or board-revision claims.
{kind=link}