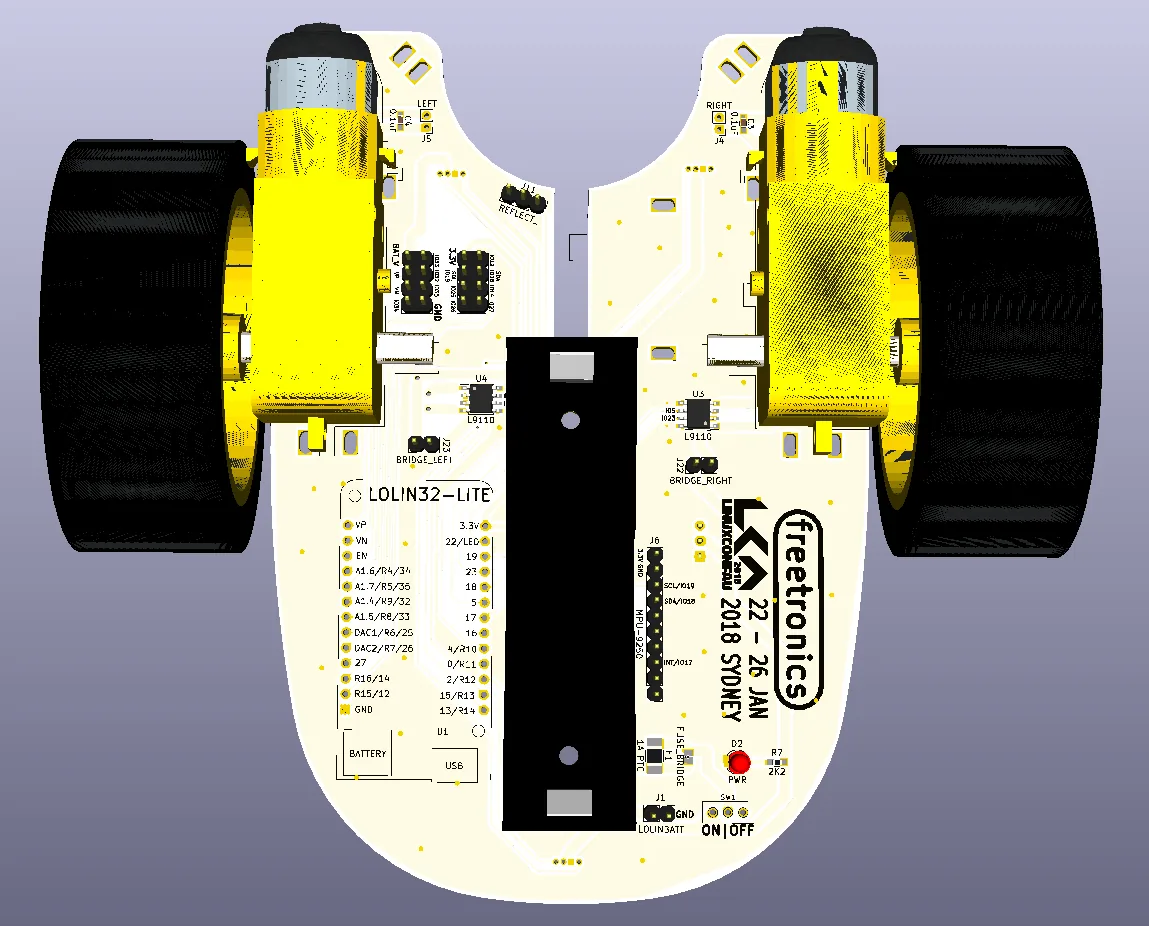
LCA2018 LoliBot
linux.conf.au 2018's Open Hardware Miniconf used LoliBot, an ESP32 two-wheel robot kit with MicroPython workshop material, public example software, USB serial setup, WiFi/MQTT configuration, sensors, motors, neopixels, and a front kicker servo.
{kind=link}